
, FI")
, NL")
, US")
, DE")
, NZ")
GCOS Reference Upper-Air Network
The climate reference network
The Global Climate Observing System (GCOS) Reference Upper-Air Network (GRUAN) is an international reference observing network of sites measuring essential climate variables above Earth's surface, designed to fill an important gap in the current global observing system. GRUAN measurements are providing long-term, high-quality climate data records from the surface, through the troposphere, and into the stratosphere. These are being used to determine trends, constrain and calibrate data from more spatially‐comprehensive observing systems (including satellites and current radiosonde networks), and provide appropriate data for studying atmospheric processes. GRUAN is envisaged as a global network of eventually 30-40 sites that, to the extent possible, builds on existing observational networks and capabilities.
GRUAN promotional video
This video provides an excellent overview of the goals and principles of GRUAN and its relation to the current challenges in climate research. You can find this and other public outreach material here.
Status of GRUAN sites

GRUAN is envisaged as a global network of eventually 30-40 measurement sites. To the extent possible, it builds on existing observational networks and capabilities. As at March 2024, GRUAN comprises of 33 sites, 14 of which have been GRUAN certified.
Status of data flow
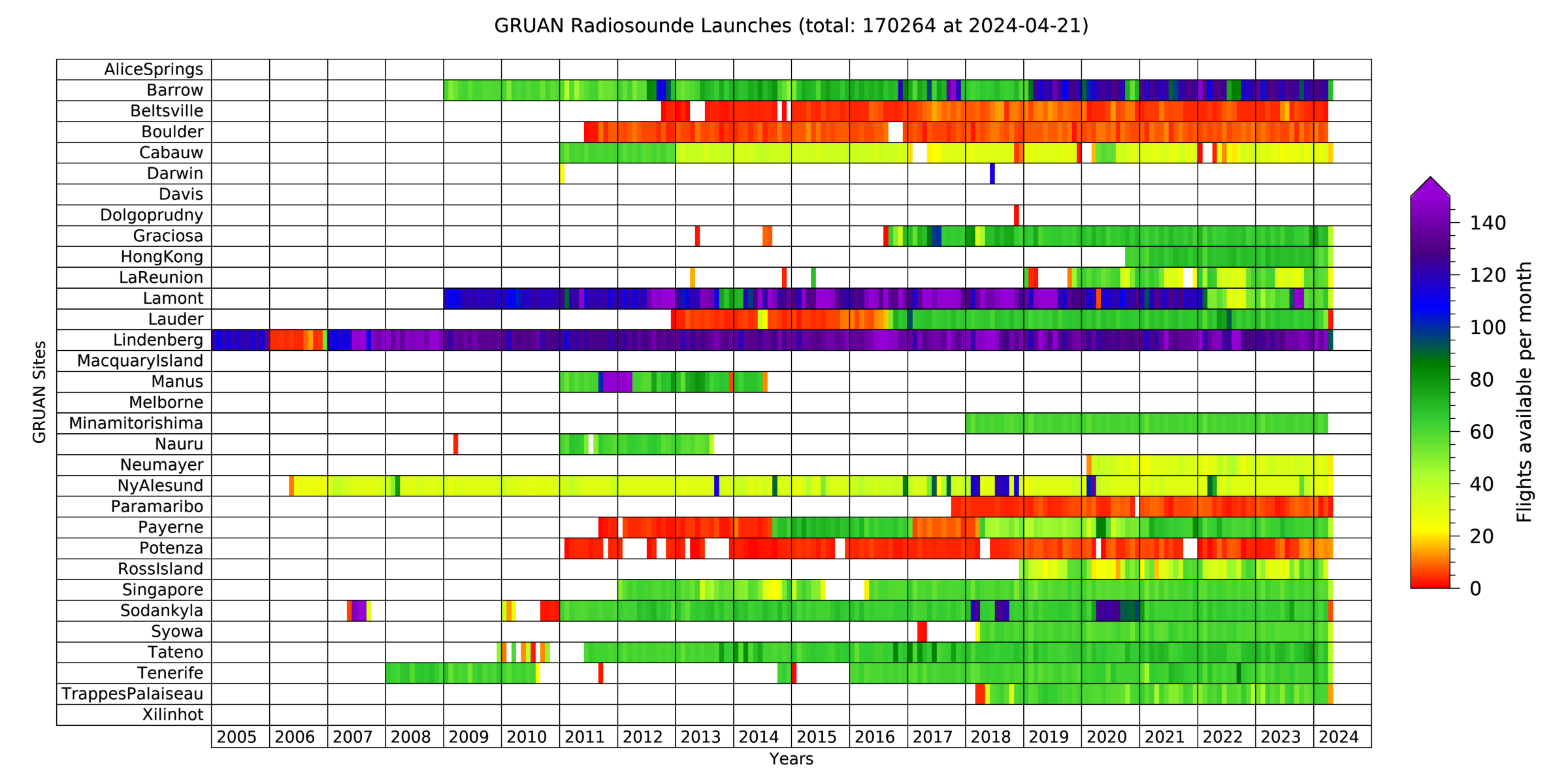
A comprehensive volume of measurement data has been collected by GRUAN since 2008. The archive includes raw data and related meta-data. For the Vaisala RS41 & RS92 and the Meisei iMS-100 & RS-11G radiosondes, GRUAN Data Products (GDP) have been fully implemented and certified. Further GDPs are in certification process or under development.
Latest news

Meeting
ICM-15: 11 - 15 March 2024 in Bern, Switzerland

Document
Report of WMO’s 2022 Upper-Air Instrument Intercomparison Campaign (IOM-143) published

Article
Atmosphere paper Mashao et al. 2024 published

Article
RS paper Rannat et al. 2023 published

Article
AMT paper Faber et al. 2023 published

Article
Axioms paper Fassò et al. 2023 published

Document
GRUAN Technical Note 14 published

Document
GCOS-253 - GRUAN Implementation Plan 2024-2030 published

Document Data product
RS41 GRUAN Technical Document 8 (GRUAN-TD-8) published
Meeting
ICM-15 mid-March 2024 in Switzerland

Article